



|
상세 정보 |
|||
| 사용: | 의학적 치료 | 상품 이름: | 로봇을 팰릿 위에 얹는 주축 산업적 현대 HH4 골라내어 붙이기 |
|---|---|---|---|
| 브랜드: | 현대 | 모델: | HH4 |
| 주축: | 6 | 보호: | IP 30 |
| 장착: | 어떠한 각 | 제어기: | Hi5a-S30,S00,S80/Hi5a-S20 |
| (m)에 도달하세요: | 0.58 | 화물 (Kg): | 4 |
| 집단: | 25 킬로그램 | 공항: | 상하이 |
| 하이 라이트: | 6 주축은 ABB 로봇 HH4를 사용했습니다,HH4는 로보틱 아암을 사용했습니다,사용된 ABB 로봇 현대 HH4 |
||
제품 설명
로봇 물질을 팰릿 위에 얹는 사용된 핸딩 로봇 팔 6 주축 산업적 현대 HH4 골라내어 붙이기
제품 설명
| 1 킬로그램 북집주기 | IRB 120 |
| 25 X 300 X 25 밀리미터 | 0.58 S |
| 25 X 300 X 25와 함께 180' 주축 6 재방향설정 |
0.92 S |
| 가속 시간 0-1 초당 미터 | 0.07 S |
| 위치 반복성 | 0.01 밀리미터 |
| 축 운동 | 동작 영역 | 주축 최대 속도 IRB 120 |
| 주축 1 회전 | +165' -165에' | 250 '/s |
| 주축 2 팔 | +110' -110에' | 250 '/s |
| 주축 3 팔 | +70' -110에' | 250 '/s |
| 주축 4 손목 | +160' -160에' | 320 '/s |
| 주축 5는 구부러집니다 | +120' -120에' | 320 '/s |
| 주축 6은 돕니다 |
이행하지 않으세요 : +400' -400에' 맥스. 활성화하세요 : -242에 대한 +242 |
420 '/s |
| 로봇 버전 | (m)에 도달하세요 | 화물 (킬로그램) | 한아름 (킬로그램) |
| IRB 120-3/0.6 | 0.58 | 3* | 0.30 |
| 감원의 수 | 6 | ||
| 보호 | IP 30 | ||
| 장착 | 어떠한 각 | ||
| 제어기 | IRC5 소형이 / IRC5 단일 캐비닛 | ||
| 통합된 신호 공급 | 손목 위의 10개 신호 | ||
| 통합된 급기 | 손목 (5개 바) 위의 4개 공기 | ||
소형이고 가볍습니다
IRB 120의 콤팩트 디자인은 그것이 다른 로봇에 대한 기계 또는 마감꼭대기에서의, 세포 안에 있는 예를 위해 어떠한 제한 없이 어떠한 각도에서 어딘가에 사실상 탑재될 수 있게 합니다.
IRB 120은 그것의 25 킬로그램 체중으로 시장에서 통합되도록 또한 가장 가지고 다닐 수 있고 쉽습니다. 평활 표면은 세척되기 쉽고 공기와 고객 신호를 위한 더 케이블이 내부로 줄곧 피트로부터 손목에, 경로화됨으로써, 통합이 힘들이지 않도록 합니다.
다목적
IRB 120은 전자적인 것을 포함한 산업, 식품과 음료, 기계, 태양 에너지, 제약, 메디컬과 연구 분야의 넓은 범위에 대해 이상적입니다.
식품 등급 주유 (NSF H1) 선택은 식품과 음료수 응용을 위해 타협하지 않는 안전과 위생을 보증하는 무균실 ISO 수업 5를 포함합니다.
빨리, 정확하고 민첩합니다
빛, 알루미늄 구조로 설계되어 모터는 로봇이 급가속에 의해서 가능케 된다는 것을 보증하고, 어떠한 적용에서도 정확도와 민첩성을 전달할 수 있습니다.
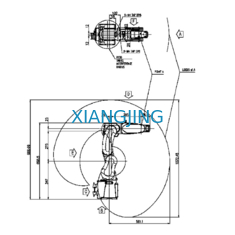
최적화된 동작 영역
IRB 120은 580 밀리미터의 방수거리, 최고 수준 타격, 그것의 토대와 매우 소형 선회반지름 아래에 112 밀리미터에 도달하기 위한 능력을 가지고 있습니다.
IRC5 소형이 제어기 - 작은 로봇을 위한 최적화됩니다
ABB의 새로운 IRC5 소형이 제어기는 소형인 포맷에서 IRC5 제어기의 역량을 제공합니다. 그것은 큰 설비에 독점적이고, 안에 전체 신호와 내장된 확장가능한 16을 위해 1상분 전원 입력, 외부 커넥터를 통해 쉬운 위임을 가능하게 하는 적용, 16 아웃, 입출력 시스템에 정확도와 운동 제어를 가져옵니다.
오프라인 프로그래밍을 위한 로봇튜디오는 업체들이 로봇을 위해 적정 위치를 발견하기 위해 생산 세포를 시뮬레이션하고, 생산에 손실이 큰 다운 시간과 지연을 방지하기 위해 프로그래밍하여 오프라인으로 공급할 수 있게 합니다.
감소된 점유상 면적
새로운 IRC5 소형이 제어기와의 IRB 120의 새로운 가벼운 구조의 조합은 의미 심장하게 감소된 점유상 면적을 도입합니다.
제품 이미지
![]()
이 제품에 대한 자세한 내용을 알고 싶습니다